UE4 蓝图获取LeapMotion Grab Strength 判断是否握拳(Grab Strength)抓取
本文共 437 字,大约阅读时间需要 1 分钟。
在Leap Motion的Leap Event Interface 事件中有一个 Leap HandReleased 事件通过该事件是无法精确的判定握拳释放的,因为会造成误差,
比如说:通过握拳晃动时,它的Strength值大多数情况下在0.8-0.9范围内。通过该事件响应操作便会不精确。通常情况下,我们只需要两种状态: 握拳事件Strength值为:1;非握拳状态的值为:0。 所以,我们需要自定义一个握拳事件,来执行响应为0的状态值,以下蓝图,是个人连的一个蓝图自定义事件,获取Strength值,判定并操作: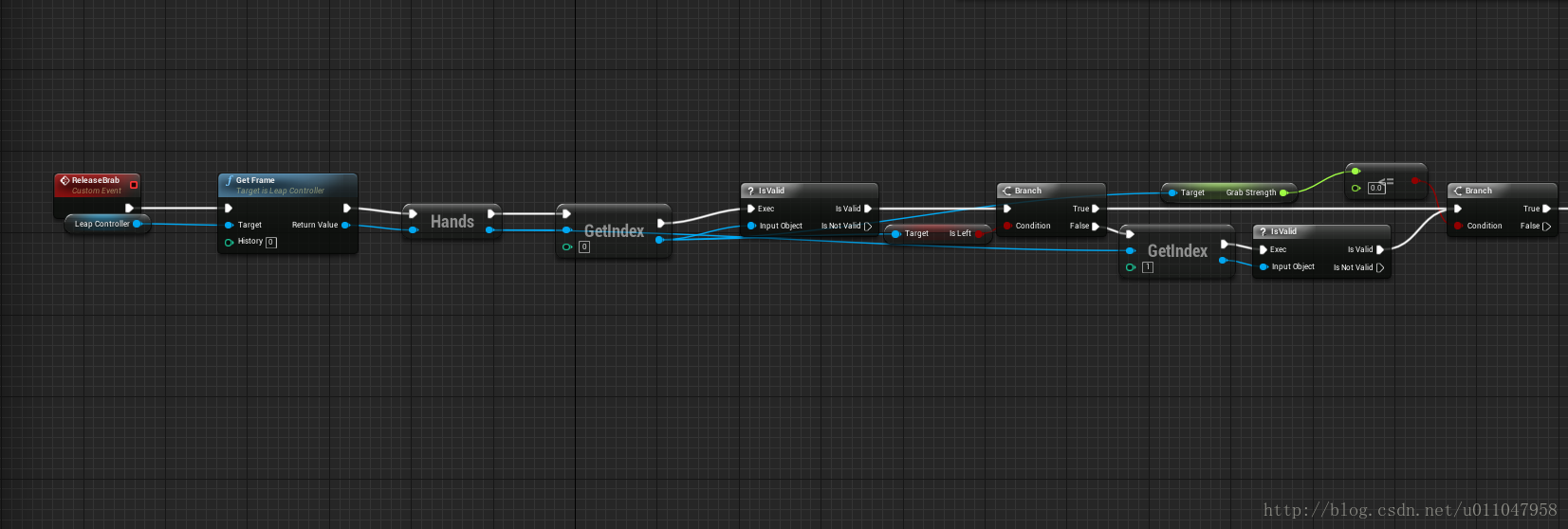 ReleasedBrab(手误,本来是想写成ReleasedGrab的)是一个自定义事件,通过LeapController 的GetFrame拿到Hands数组 然后索引到第一个手型,并判定是否为空,接着判定是否为左手(如果个人需要的话)接着通过hand拿到Grab Strength的值接着进行判定即可 同理,我们可以拿到右手Grab Strength。
ReleasedBrab(手误,本来是想写成ReleasedGrab的)是一个自定义事件,通过LeapController 的GetFrame拿到Hands数组 然后索引到第一个手型,并判定是否为空,接着判定是否为左手(如果个人需要的话)接着通过hand拿到Grab Strength的值接着进行判定即可 同理,我们可以拿到右手Grab Strength。
你可能感兴趣的文章
Oracle PL/SQL语言初级教程之操作和控制语言
查看>>
Oracle PL/SQL语言初级教程之过程和函数
查看>>
Oracle PL/SQL语言初级教程之表和视图
查看>>
Oracle PL/SQL语言初级教程之完整性约束
查看>>
PL/SQL学习笔记
查看>>
如何分析SQL语句
查看>>
结构化查询语言(SQL)原理
查看>>
SQL教程之嵌套SELECT语句
查看>>
日本語の記号の読み方
查看>>
计算机英语编程中一些单词
查看>>
JavaScript 经典例子
查看>>
判断数据的JS代码
查看>>
js按键事件说明
查看>>
AJAX 初次体验!推荐刚学看这个满好的!
查看>>
AJAX 设计制作 在公司弄的 非得要做出这个养的 真晕!
查看>>
Linux 查看文件大小
查看>>
Java并发编程:线程池的使用
查看>>
redis单机及其集群的搭建
查看>>
Java多线程学习
查看>>
检查Linux服务器性能
查看>>